نمونه هایی از اتصال مقاومت های متغیر در نمودار. چه نوع مقاومت های متغیری وجود دارد؟ نحوه اتصال یک مقاومت متغیر
آخرین بار برای اتصال LED به منبع جریان مستقیمبا ولتاژ 6.4 ولت (4 باتری AA)، از مقاومتی با مقاومت حدود 200 اهم استفاده کردیم. این اساسا تضمین کرد کار معمولی LED و از سوختن آن جلوگیری کرد. اما اگر بخواهیم روشنایی LED را تنظیم کنیم چه؟
برای انجام این کار، ساده ترین گزینه استفاده از یک پتانسیومتر (یا مقاومت اصلاح کننده) است. در بیشتر موارد، از یک سیلندر با یک دستگیره تنظیم مقاومت و سه کنتاکت تشکیل شده است. بیایید بفهمیم که چگونه کار می کند.
لازم به یادآوری است که تنظیم روشنایی LED با مدولاسیون PWM صحیح است و نه با تغییر ولتاژ، زیرا برای هر دیود یک ولتاژ عملیاتی بهینه وجود دارد. اما برای نشان دادن واضح استفاده از پتانسیومتر، چنین استفاده ای از آن (پتانسیومتر) برای اهداف آموزشی قابل قبول است.
با آزاد کردن چهار گیره و برداشتن پوشش زیرین، خواهیم دید که دو کنتاکت بیرونی به مسیر گرافیت متصل شده اند. کنتاکت میانی به کنتاکت حلقه داخل متصل است. و دستگیره تنظیم به سادگی بلوز اتصال مسیر گرافیتی و تماس حلقه را حرکت می دهد. هنگامی که دستگیره را میچرخانید، طول قوس مسیر گرافیتی تغییر میکند که در نهایت مقاومت مقاومت را تعیین میکند.
 لازم به ذکر است که هنگام اندازه گیری مقاومت بین دو کنتاکت شدید، قرائت مولتی متر با مقاومت اسمی پتانسیومتر مطابقت دارد، زیرا در این حالت مقاومت اندازه گیری شده با مقاومت کل مسیر گرافیت (در مورد ما 2 کیلو اهم) مطابقت دارد. ). و مجموع مقاومت های R1 و R2 بدون توجه به زاویه چرخش دستگیره تنظیم، همیشه تقریباً برابر با مقدار اسمی خواهد بود.
لازم به ذکر است که هنگام اندازه گیری مقاومت بین دو کنتاکت شدید، قرائت مولتی متر با مقاومت اسمی پتانسیومتر مطابقت دارد، زیرا در این حالت مقاومت اندازه گیری شده با مقاومت کل مسیر گرافیت (در مورد ما 2 کیلو اهم) مطابقت دارد. ). و مجموع مقاومت های R1 و R2 بدون توجه به زاویه چرخش دستگیره تنظیم، همیشه تقریباً برابر با مقدار اسمی خواهد بود.
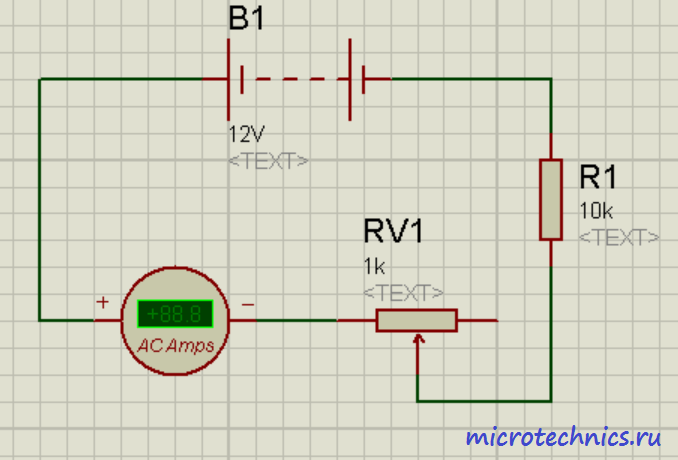
بنابراین، با اتصال یک پتانسیومتر به صورت سری به LED، همانطور که در نمودار نشان داده شده است، با تغییر مقاومت آن، می توانید روشنایی LED را تغییر دهید. اساساً وقتی مقاومت پتانسیومتر را تغییر می دهیم، جریان عبوری از LED را تغییر می دهیم که منجر به تغییر در روشنایی آن می شود.

 با این حال، باید به خاطر داشت که برای هر LED حداکثر جریان مجاز وجود دارد، در صورت تجاوز، به سادگی می سوزد. بنابراین، برای جلوگیری از سوختن دیود در هنگام چرخاندن بیش از حد دستگیره پتانسیومتر، می توانید مقاومت دیگری را به صورت سری با مقاومت حدود 200 اهم متصل کنید (این مقاومت بستگی به نوع LED مورد استفاده دارد) همانطور که در نمودار زیر نشان داده شده است.
با این حال، باید به خاطر داشت که برای هر LED حداکثر جریان مجاز وجود دارد، در صورت تجاوز، به سادگی می سوزد. بنابراین، برای جلوگیری از سوختن دیود در هنگام چرخاندن بیش از حد دستگیره پتانسیومتر، می توانید مقاومت دیگری را به صورت سری با مقاومت حدود 200 اهم متصل کنید (این مقاومت بستگی به نوع LED مورد استفاده دارد) همانطور که در نمودار زیر نشان داده شده است.

برای مرجع: LED ها باید با "پای" بلند به + و یک کوتاه به - وصل شوند. در غیر این صورت، LED به سادگی در ولتاژهای پایین روشن نمی شود (جریان را عبور نمی دهد)، و در یک ولتاژ خاص، به نام ولتاژ شکست (در مورد ما 5 ولت است)، دیود از کار می افتد.
پتانسیومتردستگاهی است که اکثر ما آن را با دکمه صدا بیرون زده از رادیو مرتبط میدانیم. امروزه در عصر دیجیتال از پتانسیومتر زیاد استفاده نمی شود.
با این حال، این دستگاه جذابیت خاصی دارد و نمی توان آن را در جایی که به تنظیم صاف "آنالوگ" نیاز است جایگزین کرد. مثلاً اگر روی کنسول بازی با گیم پد بازی می کنید. گیم پد دارای دستگیره های آنالوگ است که اغلب از 2 پتانسیومتر تشکیل شده است. یکی محور افقی و دیگری محور عمودی را کنترل می کند. به لطف این پتانسیومترها، بازی دقیق تر از جوی استیک دیجیتال معمولی می شود.
پتانسیومتر یک مقاومت متغیر است. مقاومت یک عنصر رادیویی است که عبور جریان از آن را دشوار می کند. در مواردی که نیاز به کاهش ولتاژ یا جریان است استفاده می شود.
یک مقاومت یا پتانسیومتر قابل تنظیم همین هدف را انجام می دهد، با این تفاوت که مقاومت ثابتی ندارد، اما بر اساس نیاز کاربر تغییر می کند. این بسیار راحت است زیرا همه افراد حجم، روشنایی و سایر ویژگی های دستگاه را که قابل تنظیم هستند ترجیح می دهند.

امروزه میتوان گفت که پتانسیومتر ویژگیهای عملکردی دستگاه را تنظیم نمیکند (این کار توسط خود مدار با نمایشگر دیجیتال و دکمهها انجام میشود)، اما برای تغییر پارامترهای آن، مانند کنترل در بازی، انحراف ایلرهای یک هواپیمای کنترل از راه دور، چرخش دوربین مداربسته و غیره.
پتانسیومتر چگونه کار می کند؟
یک پتانسیومتر سنتی دارای یک شفت است که یک دستگیره برای تغییر مقاومت روی آن قرار می گیرد و 3 پایانه دارد.
دو پایانه بیرونی توسط مواد رسانای الکتریکی به یکدیگر متصل می شوند مقاومت ثابت. در واقع یک مقاومت ثابت است. ترمینال مرکزی پتانسیومتر به یک کنتاکت متحرک متصل است که در امتداد مواد رسانای الکتریکی حرکت می کند. در نتیجه تغییر موقعیت کنتاکت متحرک، مقاومت بین پایانه مرکزی و پایانه های بیرونی پتانسیومتر نیز تغییر می کند.
بنابراین، پتانسیومتر می تواند مقاومت خود را بین کنتاکت مرکزی و هر یک از کنتاکت های بیرونی از 0 اهم به حداکثر مقدار نشان داده شده روی بدنه تغییر دهد.
به طور شماتیک، پتانسیومتر را می توان به صورت دو مقاومت ثابت نشان داد:

در تقسیمکننده ولتاژ، پایانههای شدید مقاومتها بین منبع تغذیه Vcc و GND زمین وصل میشوند. و پایه میانی از GND یک ولتاژ پایینتر جدید ایجاد میکند.
Uout = Uin*R2/(R1+R2)
اگر مقاومتی با حداکثر مقاومت 10 کیلو اهم داشته باشیم و دسته آن را به حالت وسط حرکت دهیم، 2 مقاومت با مقدار 5 کیلو اهم به دست خواهیم آورد. با اعمال ولتاژ 5 ولت به ورودی، در خروجی تقسیم کننده ولتاژ را بدست می آوریم:
Uout = Uin * R2/(R1+R2) = 5*5000/(5000+5000) = 5*5/10 = 5*1/2 = 2.5V
معلوم شد که ولتاژ خروجی برابر با نصف ولتاژ ورودی است.
اگر دستگیره را بچرخانیم تا پایه مرکزی به پایه Vcc وصل شود چه اتفاقی می افتد؟
Uout = Uin*R2/(R1+R2) = 5*10000/(0+10000) = 5*10000/10000 = 5*1 = 5V
از آنجایی که مقاومت مقاومت R1 به 0 اهم کاهش یافت و مقاومت R2 به 10 کیلو اهم افزایش یافت، ما حداکثر ولتاژ خروجی را در خروجی دریافت کردیم.
اگر دستگیره را کاملاً در جهت مخالف بچرخانیم چه اتفاقی می افتد؟
Uout = Uin*R2/(R1+R2) = 5*0/(10000 0) = 5*0 = 0V
در این حالت، R1 حداکثر مقاومت 10 کیلو اهم خواهد داشت و R2 به 0 کاهش می یابد. در واقع هیچ ولتاژی در خروجی وجود نخواهد داشت.
به نظر یک جزئیات ساده است، چه چیزی می تواند در اینجا پیچیده باشد؟ اما نه! چند ترفند برای استفاده از این چیز وجود دارد. از نظر ساختاری، مقاومت متغیر به همان روشی ساخته شده است که در نمودار نشان داده شده است - نواری از مواد با مقاومت، تماس ها به لبه ها لحیم می شوند، اما یک ترمینال سوم متحرک نیز وجود دارد که می تواند هر موقعیتی را بر روی این نوار بگیرد و قسمت ها را تقسیم کند. مقاومت به قطعات این می تواند هم به عنوان یک تقسیم کننده ولتاژ قابل اورکلاک (پتانسیومتر) و هم به عنوان یک مقاومت متغیر عمل کند - اگر فقط نیاز به تغییر مقاومت دارید.
این ترفند سازنده است:
فرض کنید باید یک مقاومت متغیر ایجاد کنیم. ما به دو خروجی نیاز داریم، اما دستگاه دارای سه خروجی است. به نظر می رسد که چیز بدیهی خود را نشان می دهد - از یک نتیجه گیری افراطی استفاده نکنید، بلکه فقط از حد وسط و دوم استفاده کنید. ایده بد! چرا؟ فقط این است که هنگام حرکت در امتداد نوار، تماس متحرک می تواند بپرد، بلرزد و در غیر این صورت تماس با سطح را از دست بدهد. در این حالت مقاومت مقاومت متغیر ما بی نهایت می شود و باعث تداخل در هنگام تنظیم، جرقه زدن و سوختن از مسیر گرافیتی مقاومت می شود و دستگاه در حال تنظیم از حالت تنظیم مجاز خارج می شود که می تواند کشنده باشد.
راه حل؟ ترمینال افراطی را به وسط وصل کنید. در این مورد، بدترین چیزی که در انتظار دستگاه است، ظاهر کوتاه مدت حداکثر مقاومت است، اما نه شکستگی.
مبارزه با مقادیر حدی
اگر یک مقاومت متغیر جریان را تنظیم کند، مثلاً یک LED را تغذیه کند، پس از اینکه به موقعیت شدید میرسیم، میتوانیم مقاومت را به صفر برسانیم، و این اساساً عدم وجود مقاومت است - LED روشن میشود و میسوزد. بنابراین باید یک مقاومت اضافی معرفی کنید که حداقل مقاومت مجاز را تعیین کند. علاوه بر این، در اینجا دو راه حل وجود دارد - بدیهی و زیبا :) بدیهی است در سادگی قابل درک است، اما زیبایی قابل توجه است که ما حداکثر مقاومت ممکن را با توجه به عدم امکان به صفر رساندن موتور تغییر نمی دهیم. هنگامی که موتور در بالاترین موقعیت قرار دارد، مقاومت برابر خواهد بود (R1*R2)/(R1+R2)- حداقل مقاومت و در پایین ترین نقطه برابر خواهد بود R1- موردی که ما محاسبه کردیم و نیازی به اضافه کردن مقاومت اضافی نیست. زیباست! :)
اگر نیاز به وارد کردن محدودیت در هر دو طرف دارید، به سادگی یک مقاومت ثابت را در بالا و پایین وارد کنید. ساده و موثر. در عین حال، طبق اصل ارائه شده در زیر، می توانید افزایش دقت را دریافت کنید.
گاهی اوقات لازم است که مقاومت را با تعداد زیادی کیلو اهم تنظیم کنید، اما آن را فقط کمی تنظیم کنید - کسری از درصد. برای اینکه از پیچ گوشتی برای گرفتن این میکرودرجات چرخش موتور روی یک مقاومت بزرگ استفاده نکنند، دو متغیر نصب می کنند. یکی برای مقاومت بزرگ، و دومی برای مقاومت کوچک، برابر با مقدار تنظیم مورد نظر. در نتیجه، ما دو چرخان داریم - یکی " خشن"دومین" دقیقا"ما بزرگ را روی یک مقدار تقریبی تنظیم می کنیم، و سپس با مقدار کوچک آن را به شرایط می رسانیم.
تعیین ها، پارامترها مقاومت های الکتریکی به طور گسترده در دستگاه های رادیویی و الکترونیکی استفاده می شود. در مهندسی برق معمولاً مقاومت های الکتریکی را RESISTOR می نامند. می دانیم که مقاومت الکتریکی با واحدهایی به نام اهم اندازه گیری می شود. در عمل، مقاومت های هزاران یا حتی میلیون ها اهم اغلب مورد نیاز است. بنابراین، واحدهای ابعادی زیر برای تعیین مقاومت اتخاذ می شوند:
هدف اصلی مقاومت ها ایجاد جریان یا ولتاژ لازم برای عملکرد طبیعیمدارهای الکترونیکی.
بیایید نموداری از استفاده از مقاومت ها را در نظر بگیریم، به عنوان مثال، برای به دست آوردن یک ولتاژ معین.
اجازه دهید یک منبع تغذیه گیگابایت با ولتاژ U=12V داشته باشیم. باید ولتاژ خروجی U1=4V را بدست آوریم. ولتاژ در مدار معمولاً نسبت به سیم مشترک (زمین) اندازه گیری می شود.
ولتاژ خروجی برای یک جریان معین در مدار محاسبه می شود (I در نمودار). فرض کنید جریان 0.04A باشد. اگر ولتاژ R2 4 ولت باشد، ولتاژ R1 Ur1 = U - U1 = 8V خواهد بود. با استفاده از قانون اهم، مقدار مقاومت های R1 و R2 را می یابیم.
R1 = 8 / 0.04 = 200 اهم؛
R2 = 4 / 0.04 = 100 اهم. 
برای اجرای چنین مداری، باید با دانستن مقدار مقاومت، مقاومت هایی با توان مناسب انتخاب کنیم. بیایید توان تلف شده توسط مقاومت ها را محاسبه کنیم.
قدرت مقاومت R1 نباید کمتر از: Pr1 = Ur1 2 / R1 باشد. Pr1 = 0.32Wt و توان R2: Pr2 = U1 2 / R2 = 0.16Wt. مدار نشان داده شده در شکل را تقسیم کننده ولتاژ می نامند و برای بدست آوردن ولتاژهای کمتر نسبت به ولتاژ ورودی استفاده می شود.
ویژگی های طراحی مقاومت ها
از نظر ساختاری، مقاومت ها بر اساس مقاومت خود (اسمی)، انحراف به عنوان درصدی از اسمی و اتلاف توان تقسیم می شوند. درجه مقاومت و درصد انحراف از درجه بندی با کتیبه یا علامت رنگی روی مقاومت نشان داده می شود و قدرت با ابعاد کلی مقاومت (برای مقاومت های کم و متوسط تا 1 وات) تعیین می شود. مقاومت های قدرتمند، قدرت روی بدنه مقاومت نشان داده شده است. 
پرکاربردترین مقاومت ها از نوع MLT و BC هستند. این مقاومت ها به شکل استوانه ای هستند و دارای دو پایانه برای اتصال به مدار الکتریکی می باشند. از آنجایی که مقاومت ها (نه مقاومت های قدرتمند) اندازه کوچکی دارند، معمولاً با نوارهای رنگی مشخص می شوند. هدف از راه راه های رنگی استاندارد و معتبر برای تمام مقاومت های تولید شده در هر کشور در جهان است.

باندهای اول و دوم بیان عددی مقاومت اسمی مقاومت هستند. باند سوم عددی است که باید در آن عبارت عددی بدست آمده از باندهای اول و دوم را ضرب کنید. باند چهارم درصد انحراف (تلرانس) مقدار مقاومت از مقدار اسمی است.

تقسیم کننده ولتاژ. مقاومت های متغیر
بیایید دوباره به تقسیم کننده ولتاژ برگردیم. گاهی اوقات لازم است که نه یک، بلکه چندین ولتاژ کمتر نسبت به ولتاژ ورودی بدست آوریم. برای به دست آوردن چندین ولتاژ U1, U2 ... Un می توانید از تقسیم کننده ولتاژ سری استفاده کنید و برای تغییر ولتاژ در خروجی تقسیم کننده از کلید (با علامت SA) استفاده کنید.

بیایید مدار تقسیم کننده ولتاژ سری را برای سه ولتاژ خروجی U1=2V، U2=4V و U3=10V با ولتاژ ورودی U=12V محاسبه کنیم.
فرض کنید جریان I در مدار 0.1 آمپر باشد.

ابتدا اجازه دهید ولتاژ مقاومت R4 را پیدا کنیم. Ur4 = U - U3; Ur4 = 12 - 10 = 2V.
بیایید مقدار مقاومت R4 را پیدا کنیم. R4 = Ur4 / I; R4 = 2V / 0.1A = 20 Ohm.
ما ولتاژ R1 را می دانیم، 2 ولت است.
بیایید مقدار مقاومت R1 را پیدا کنیم. R1 = U1 / I; R1 = 2V / 0.1A = 20 Ohm.
ولتاژ روی R2 برابر با U2 - Ur1 است. Ur2 = 4V - 2V = 2V.
بیایید مقدار مقاومت R2 را پیدا کنیم. R2 = Ur2 / I; R2=2V/0.1A=20 اهم.
و در نهایت، مقدار R3 را پیدا می کنیم، برای این ما ولتاژ R3 را تعیین می کنیم.
Ur3 = U3 - U2; Ur3 = 10V - 4V = 6V. سپس R3 = Ur3 / I = 6V / 0.1A = 60 Ohm.
بدیهی است که با دانستن نحوه محاسبه یک تقسیم کننده ولتاژ، می توانیم برای هر ولتاژ و هر تعداد ولتاژ خروجی یک تقسیم کننده بسازیم.
تغییر مرحله ای (نه صاف) در ولتاژ در خروجی، گسسته نامیده می شود. چنین تقسیم کننده ولتاژ همیشه قابل قبول نیست زیرا با تعداد ولتاژهای خروجی زیاد، به تعداد زیادی مقاومت و یک کلید چند موقعیتی نیاز دارد و ولتاژ خروجی به آرامی تنظیم نمی شود.
چگونه یک تقسیم کننده با ولتاژ خروجی قابل تنظیم مداوم بسازیم؟ برای این کار از یک مقاومت متغیر استفاده کنید. دستگاه یک مقاومت متغیر در شکل نشان داده شده است. 
حرکت نوار لغزنده منجر به تغییر آرام مقاومت می شود. حرکت لغزنده از پایین (نمودار را ببینید) به موقعیت بالا منجر به تغییر آرام ولتاژ U می شود که توسط ولت متر نشان داده می شود.

تغییر مقاومت بسته به موقعیت لغزنده معمولاً به صورت درصد بیان می شود. مقاومت های متغیر، بسته به کاربرد در مدارهای الکترونیکی و طراحی، می توانند:
وابستگی خطی مقاومت به موقعیت لغزنده - خط A در نمودار.
وابستگی لگاریتمی - منحنی B روی نمودار.
وابستگی لگاریتمی معکوس - منحنی B روی نمودار.
وابستگی تغییر مقاومت به حرکت لغزنده برای مقاومت های متغیر بر روی بدنه مقاومت با حرف مربوطه در انتهای علامت نوع مقاومت نشان داده می شود.
از نظر ساختاری، مقاومت های متغیر به مقاومت هایی با حرکت خطی لغزنده (شکل 1)، مقاومت هایی با حرکت دایره ای لغزنده (شکل 2) و مقاومت های تنظیم کننده برای تنظیم و تنظیم مدارهای الکترونیکی (شکل 3) تقسیم می شوند. با توجه به پارامترها، مقاومت های متغیر بر اساس مقاومت اسمی، قدرت و وابستگی تغییر مقاومت به تغییرات در موقعیت لغزنده تقسیم می شوند. به عنوان مثال، نام SP3-23a 22 کیلو اهم 0.25 W به این معنی است: مقاومت متغیر، مدل شماره 23، مشخصه تغییر مقاومت نوع "A"، مقاومت اسمی 22 کیلو اهم، توان 0.25 وات.

مقاومت های متغیر به طور گسترده در دستگاه های رادیویی و الکترونیکی به عنوان تنظیم کننده، عناصر تنظیم و کنترل استفاده می شود. برای مثال، احتمالاً با تجهیزات رادیویی مانند رادیو یا سیستم استریو آشنایی دارید. آنها از مقاومت های متغیر به عنوان کنترل صدا، تن و فرکانس استفاده می کنند.

شکل بخشی از بلوک کنترل صدا و صدا را نشان می دهد مرکز موسیقیو کنترل صدا از مقاومت های متغیر لغزنده خطی استفاده می کند و کنترل صدا دارای یک لغزنده چرخان است.

بیایید نگاهی به مقاومت متغیر بیندازیم ... در مورد آن چه می دانیم؟ هنوز هیچی، زیرا ما حتی پارامترهای اصلی این قطعه رادیویی را که در الکترونیک بسیار رایج است، نمی دانیم. بنابراین بیایید در مورد پارامترهای متغیرها و مقاومت های اصلاح بیشتر بدانیم.

برای شروع، شایان ذکر است که مقاومت های متغیر و برش، اجزای غیرفعال مدارهای الکترونیکی هستند. این بدان معنی است که آنها در طول کار خود انرژی را از مدار الکتریکی مصرف می کنند. عناصر مدار غیر فعال نیز شامل خازن ها، سلف ها و ترانسفورماتورها هستند.
آنها پارامترهای زیادی ندارند، به استثنای محصولات دقیقی که در فناوری نظامی یا فضایی استفاده می شوند:
مقاومت اسمی. بدون شک این پارامتر اصلی است. مقاومت کل می تواند از ده ها اهم تا ده ها مگا اهم متغیر باشد. چرا مقاومت کامل؟ این مقاومت بین خارجی ترین پایانه های ثابت مقاومت است - تغییر نمی کند.
با استفاده از نوار لغزنده تنظیم، می توانیم مقاومت بین هر یک از پایانه های شدید و ترمینال کنتاکت متحرک را تغییر دهیم. مقاومت از صفر تا مقاومت کامل مقاومت (یا برعکس - بسته به اتصال) متفاوت است. مقاومت اسمی مقاومت بر روی بدنه آن با استفاده از یک کد الفبایی (M15M، 15k و غیره) نشان داده شده است.
توان تلف شده یا نامی. در تجهیزات الکترونیکی معمولی از مقاومت های متغیر با توان 0.04 استفاده می شود. 0.25; 0.5; 1.0; 2.0 وات یا بیشتر
شایان ذکر است که مقاومت های متغیر سیمی، به طور معمول، قوی تر از مقاومت های لایه نازک هستند. بله، این تعجب آور نیست، زیرا یک فیلم رسانای نازک می تواند جریان بسیار کمتری را نسبت به یک سیم تحمل کند. بنابراین، ویژگی های قدرت را می توان به طور تقریبی حتی بر اساس قضاوت کرد ظاهر"متغیر" و ساخت آن.
حداکثر یا محدود کردن ولتاژ کاری. اینجا همه چیز روشن است. این حداکثر ولتاژ عملکرد مقاومت است که نباید از آن بیشتر شود. برای مقاومت های متغیر، حداکثر ولتاژ مربوط به سری های: 5، 10، 25، 50، 100، 150، 200، 250، 350، 500، 750، 1000، 1500، 3000، 8000 ولت است. ولتاژ نهایی برخی از نمونه ها:
SP3-38 (a - d)برای توان 0.125 W - 150 V (برای کار در مدارهای AC و DC)؛
SP3-29a- 1000 ولت (برای کار در مدارهای AC و DC)؛
SP5-2- از 100 تا 300 ولت (بسته به اصلاح و مقاومت نامی).
TCR - ضریب مقاومت دما. مقداری که تغییر مقاومت را در هنگام تغییر دمای محیط به میزان 1 0 درجه سانتیگراد نشان می دهد. برای تجهیزات الکترونیکی که در شرایط سخت آب و هوایی کار می کنند، این پارامتر خیلی مهم.
به عنوان مثال، برای اصلاح مقاومت ها SP3-38مقدار TCR مربوط به ± 1000 * 10 -6 1/0 C (با مقاومت تا 100 کیلو اهم) و ± 1500 * 10 -6 1/0 C (بیش از 100 کیلو اهم) است. برای محصولات دقیق، مقادیر TCS در محدوده 1 * 10 -6 1/0 C تا 100 * 10 -6 1/0 C قرار دارد. واضح است که هرچه مقدار TCR کوچکتر باشد، مقاومت از نظر حرارتی پایدارتر است.
تحمل یا دقت. این پارامتر مشابه تلورانس مقاومت های ثابت است. به صورت درصد نشان داده شده است. برای اصلاح کننده و مقاومت های متغیر برای تجهیزات خانگی، تحمل معمولا بین 10 تا 30 درصد است.
دمای کاری. دمایی که در آن مقاومت عملکردهای خود را به درستی انجام می دهد. معمولاً به عنوان یک محدوده نشان داده می شود: -45 ... +55 0 C.
مقاومت در برابر سایش- تعداد چرخه های حرکت سیستم متحرک یک مقاومت متغیر که در طی آن پارامترهای آن در محدوده نرمال باقی می مانند.
برای مقاومت های متغیر (دقیق) بسیار دقیق و مهم، مقاومت سایش می تواند به 10 5 - 10 7 سیکل برسد. درست است که مقاومت در برابر شوک و لرزش چنین محصولاتی کمتر است. مقاومتهای تنظیمی در برابر تنشهای مکانیکی مقاومتر هستند، اما مقاومت سایشی آنها کمتر از مقاومتهای دقیق است، از 5000 تا 100000 سیکل. برای تیونینگ ها، این مقدار به طور قابل توجهی کمتر است و به ندرت از 1000 سیکل تجاوز می کند.
ویژگی های عملکردی. یک پارامتر مهم، وابستگی تغییر مقاومت به زاویه چرخش دسته یا موقعیت تماس متحرک (برای مقاومت های لغزنده) است. درباره این پارامتر کمی صحبت شده است، اما هنگام طراحی تجهیزات تقویت صدا و سایر دستگاه ها بسیار مهم است. بیایید در مورد آن با جزئیات بیشتر صحبت کنیم.
واقعیت این است که مقاومت های متغیر با وابستگی های مختلف تغییر مقاومت به زاویه چرخش دسته تولید می شوند. این پارامتر نامیده می شود ویژگی عملکردی. معمولاً روی کیس به شکل یک حرف رمز نشان داده می شود.
بیایید برخی از این ویژگی ها را فهرست کنیم:


بنابراین، هنگام انتخاب یک مقاومت متغیر برای طرح های الکترونیکی خانگی، باید به ویژگی های عملکردی نیز توجه کنید!
علاوه بر موارد ذکر شده، پارامترهای دیگری نیز برای متغیرها و مقاومتهای اصلاح وجود دارد. آنها عمدتاً مقادیر الکترومکانیکی و بار را توصیف می کنند. اینجا تنها تعداد کمی از آنها هستند:
وضوح؛
عدم تعادل مقاومت یک مقاومت متغیر چند عنصری؛
لحظه اصطکاک استاتیک؛
سر و صدای کشویی (چرخش)؛
همانطور که می بینید، حتی چنین قطعه معمولی دارای مجموعه کاملی از پارامترها است که می تواند بر کیفیت کار تأثیر بگذارد مدار الکترونیکی. پس آنها را فراموش نکنید.
جزئیات بیشتر در مورد پارامترهای مقاومت های ثابت و متغیر در کتاب مرجع توضیح داده شده است.
به نظر یک جزئیات ساده است، چه چیزی می تواند در اینجا پیچیده باشد؟ اما نه! چند ترفند برای استفاده از این چیز وجود دارد. از نظر ساختاری، مقاومت متغیر به همان شکلی طراحی شده است که در نمودار نشان داده شده است - نواری از مواد با مقاومت، تماس ها به لبه ها لحیم می شوند، اما یک ترمینال سوم متحرک نیز وجود دارد که می تواند هر موقعیتی را روی این نوار بگیرد. تقسیم مقاومت به قطعات این می تواند هم به عنوان یک تقسیم کننده ولتاژ قابل اورکلاک (پتانسیومتر) و هم به عنوان یک مقاومت متغیر عمل کند - اگر فقط نیاز به تغییر مقاومت دارید.
این ترفند سازنده است:
فرض کنید باید یک مقاومت متغیر ایجاد کنیم. ما به دو خروجی نیاز داریم، اما دستگاه دارای سه خروجی است. به نظر می رسد که چیز بدیهی خود را نشان می دهد - از یک نتیجه گیری افراطی استفاده نکنید، بلکه فقط از حد وسط و دوم استفاده کنید. ایده بد! چرا؟ فقط این است که هنگام حرکت در امتداد نوار، تماس متحرک می تواند بپرد، بلرزد و در غیر این صورت تماس با سطح را از دست بدهد. در این حالت مقاومت مقاومت متغیر ما بی نهایت می شود و باعث تداخل در هنگام تنظیم، جرقه زدن و سوختن از مسیر گرافیتی مقاومت می شود و دستگاه در حال تنظیم از حالت تنظیم مجاز خارج می شود که می تواند کشنده باشد.
راه حل؟ ترمینال افراطی را به وسط وصل کنید. در این مورد، بدترین چیزی که در انتظار دستگاه است، ظاهر کوتاه مدت حداکثر مقاومت است، اما نه شکستگی.
مبارزه با مقادیر حدی
اگر یک مقاومت متغیر جریان را تنظیم کند، مثلاً یک LED را تغذیه کند، پس از اینکه به موقعیت شدید میرسیم، میتوانیم مقاومت را به صفر برسانیم، و این اساساً عدم وجود مقاومت است - LED روشن میشود و میسوزد. بنابراین باید یک مقاومت اضافی معرفی کنید که حداقل مقاومت مجاز را تعیین کند. علاوه بر این، در اینجا دو راه حل وجود دارد - بدیهی و زیبا :) بدیهی است در سادگی قابل درک است، اما زیبایی قابل توجه است که ما حداکثر مقاومت ممکن را با توجه به عدم امکان به صفر رساندن موتور تغییر نمی دهیم. هنگامی که موتور در بالاترین موقعیت قرار دارد، مقاومت برابر خواهد بود (R1*R2)/(R1+R2)- حداقل مقاومت و در پایین ترین نقطه برابر خواهد بود R1- موردی که ما محاسبه کردیم و نیازی به اضافه کردن مقاومت اضافی نیست. زیباست! :)
اگر نیاز به وارد کردن محدودیت در هر دو طرف دارید، به سادگی یک مقاومت ثابت را در بالا و پایین وارد کنید. ساده و موثر. در عین حال، طبق اصل ارائه شده در زیر، می توانید افزایش دقت را دریافت کنید.
گاهی اوقات لازم است که مقاومت را با تعداد زیادی کیلو اهم تنظیم کنید، اما آن را فقط کمی تنظیم کنید - کسری از درصد. برای اینکه از پیچ گوشتی برای گرفتن این میکرودرجات چرخش موتور روی یک مقاومت بزرگ استفاده نکنند، دو متغیر نصب می کنند. یکی برای مقاومت بزرگ، و دومی برای مقاومت کوچک، برابر با مقدار تنظیم مورد نظر. در نتیجه، ما دو چرخان داریم - یکی " خشن"دومین" دقیقا"ما بزرگ را روی یک مقدار تقریبی تنظیم می کنیم، و سپس با مقدار کوچک آن را به شرایط می رسانیم.
در یکی از مقالات قبلی به جنبه های اصلی مربوط به کار با آن پرداختیم، بنابراین امروز این موضوع را ادامه خواهیم داد. هر چیزی که قبلاً در مورد آن بحث کردیم، اول از همه، مقاومت های ثابت، که مقاومت آن یک مقدار ثابت است. اما این تنها یکی نیست نگاه موجودمقاومت ها، بنابراین در این مقاله به عناصری می پردازیم که دارای مقاومت متغیر.
بنابراین، تفاوت بین یک مقاومت متغیر و یک مقاومت ثابت چیست؟ در واقع، پاسخ در اینجا مستقیماً از نام این عناصر است :) مقدار مقاومت یک مقاومت متغیر، بر خلاف مقاومت ثابت، قابل تغییر است. چگونه؟ و این دقیقاً همان چیزی است که ما متوجه خواهیم شد! ابتدا به مشروط نگاه می کنیم مدار مقاومت متغیر:

بلافاصله می توان اشاره کرد که در اینجا، بر خلاف مقاومت های با مقاومت ثابت، سه پایانه وجود دارد، نه دو. حالا بیایید بفهمیم که چرا آنها مورد نیاز هستند و چگونه همه چیز کار می کند :)
بنابراین، بخش اصلی یک مقاومت متغیر، یک لایه مقاومتی است که مقاومت خاصی دارد. نقاط 1 و 3 در شکل انتهای لایه مقاومتی هستند. یکی دیگر از بخش های مهم مقاومت، لغزنده است که می تواند موقعیت خود را تغییر دهد (می تواند هر موقعیت میانی را بین نقاط 1 و 3 بگیرد، به عنوان مثال، می تواند مانند نمودار به نقطه 2 ختم شود). بنابراین، در پایان به موارد زیر می رسیم. مقاومت بین پایانه های چپ و مرکزی مقاومت برابر با مقاومت بخش 1-2 لایه مقاومتی خواهد بود. به همین ترتیب، مقاومت بین پایانه های مرکزی و راست از نظر عددی برابر با مقاومت بخش 2-3 لایه مقاومتی خواهد بود. معلوم می شود که با حرکت دادن نوار لغزنده می توانیم هر مقدار مقاومت را از صفر به . A چیزی بیش از مقاومت کل لایه مقاومتی نیست.
از نظر ساختاری، مقاومت های متغیر هستند چرخشی، یعنی برای تغییر موقعیت نوار لغزنده باید یک دستگیره مخصوص را بچرخانید (این طرح برای مقاومت نشان داده شده در نمودار ما مناسب است). همچنین، لایه مقاومتی را می توان به شکل یک خط مستقیم ساخت، بر این اساس، لغزنده مستقیم حرکت می کند. چنین وسایلی نامیده می شوند کشویی یا کشوییمقاومت های متغیر مقاومت های روتاری در تجهیزات صوتی بسیار رایج هستند، جایی که از آنها برای تنظیم صدا/باس و غیره استفاده می شود. شکل ظاهری آنها به شرح زیر است:

یک مقاومت متغیر از نوع کشویی کمی متفاوت به نظر می رسد:

اغلب هنگام استفاده از مقاومت های دوار، از مقاومت های سوئیچ به عنوان کنترل کننده صدا استفاده می شود. مطمئناً بیش از یک بار - به عنوان مثال در رادیوها - با چنین تنظیم کننده ای روبرو شده اید. اگر مقاومت در موقعیت شدید خود باشد (حداقل صدا/دستگاه خاموش است)، سپس اگر شروع به چرخاندن آن کنید، یک کلیک قابل توجه خواهید شنید که پس از آن گیرنده روشن می شود. و با چرخش بیشتر صدا افزایش می یابد. به طور مشابه، هنگام کاهش صدا - هنگام نزدیک شدن به موقعیت شدید، دوباره یک کلیک وجود دارد، پس از آن دستگاه خاموش می شود. یک کلیک در این مورد نشان می دهد که برق گیرنده روشن/خاموش شده است. چنین مقاومتی به شکل زیر است:

همانطور که می بینید دو مورد وجود دارد خروجی اضافی. آنها دقیقا به مدار برق وصل شده اند به گونه ای که با چرخش لغزنده مدار برق باز و بسته می شود.
کلاس بزرگ دیگری از مقاومت ها وجود دارد که دارای مقاومت متغیری هستند که می توان آنها را به صورت مکانیکی تغییر داد - اینها مقاومت های اصلاح کننده هستند. بیایید کمی هم برای آنها وقت بگذاریم :)
مقاومت های تریمر.
فقط برای شروع، اجازه دهید اصطلاحات را روشن کنیم... اساسا تریم مقاومتمتغیر است، زیرا مقاومت آن قابل تغییر است، اما بیایید قبول کنیم که هنگام بحث در مورد مقاومت های برش، منظور از مقاومت های متغیر، مقاومت هایی است که قبلاً در این مقاله به آن پرداختیم (دوار، لغزنده و غیره). این ارائه را ساده تر می کند، زیرا ما این نوع مقاومت ها را با یکدیگر متضاد خواهیم کرد. و به هر حال، در ادبیات، مقاومت ها و متغیرهای برش اغلب به عنوان عناصر مدار مختلف شناخته می شوند، اگرچه، به طور دقیق، هر تریم مقاومتبه دلیل اینکه مقاومت آن قابل تغییر است نیز متغیر است.
بنابراین، تفاوت بین مقاومت های برش و متغیرهایی که قبلاً در مورد آنها صحبت کردیم، اول از همه، در تعداد چرخه های حرکت اسلایدر نهفته است. اگر برای متغیرها این عدد می تواند 50000 یا حتی 100000 باشد (یعنی دکمه ولوم را می توان تقریباً به همان اندازه که دوست دارید بچرخانید 😉) ، پس برای مقاومت های برش این مقدار بسیار کمتر است. بنابراین، مقاومت های پیرایش اغلب به طور مستقیم روی برد استفاده می شود، جایی که مقاومت آنها تنها یک بار، هنگام راه اندازی دستگاه تغییر می کند، و در حین کار، مقدار مقاومت تغییر نمی کند. از نظر خارجی، مقاومت تنظیم کاملاً متفاوت از متغیرهای ذکر شده به نظر می رسد:

تعیین مقاومت های متغیر کمی با تعیین مقاومت های ثابت متفاوت است:

در واقع، ما تمام نکات اصلی را در مورد متغیرها و مقاومتهای اصلاحی مورد بحث قرار دادهایم، اما یک مورد دیگر نیز وجود دارد. نکته مهم، که نمی توان آن را نادیده گرفت.
اغلب در ادبیات یا در مقالات مختلف می توانید با اصطلاحات پتانسیومتر و رئوستات برخورد کنید. در برخی منابع این همان چیزی است که مقاومت های متغیر نامیده می شود، در برخی دیگر این اصطلاحات ممکن است معنای دیگری داشته باشند. در واقع، تنها یک تفسیر صحیح از اصطلاحات پتانسیومتر و رئوستات وجود دارد. اگر تمام عباراتی که قبلاً در این مقاله ذکر کردیم، اول از همه به طراحی مقاومت های متغیر مربوط می شود، پس پتانسیومتر و رئوستات مدارهای مختلفی برای اتصال (!!!) مقاومت های متغیر هستند. به عنوان مثال، یک مقاومت متغیر چرخشی می تواند هم به عنوان پتانسیومتر و هم به عنوان رئوستات عمل کند - همه اینها به مدار اتصال بستگی دارد. بیایید با رئوستات شروع کنیم.
(یک مقاومت متغیر متصل در مدار رئوستات) عمدتاً برای تنظیم جریان استفاده می شود. اگر یک آمپرمتر را به صورت سری به رئوستات متصل کنیم، هنگامی که لغزنده را حرکت می دهیم، مقدار جریان در حال تغییر را مشاهده می کنیم. مقاومت در این مدار نقش یک بار را بازی می کند، جریانی که قرار است از طریق آن با یک مقاومت متغیر تنظیم کنیم. بگذارید حداکثر مقاومت رئوستات برابر باشد، سپس طبق قانون اهم، حداکثر جریان عبوری از بار برابر با:
در اینجا ما در نظر گرفتیم که جریان در حداقل مقدار مقاومت در مدار حداکثر خواهد بود، یعنی زمانی که لغزنده در موقعیت سمت چپ قرار دارد. حداقل جریان برابر با:

بنابراین معلوم می شود که رئوستات به عنوان تنظیم کننده جریان عبوری از بار عمل می کند.
یک مشکل در این مدار وجود دارد - اگر تماس بین لغزنده و لایه مقاومتی قطع شود، مدار باز می شود و جریان از آن عبور نمی کند. شما می توانید این مشکل را به صورت زیر حل کنید:

تفاوت با نمودار قبلی این است که نقاط 1 و 2 به صورت اضافی به هم وصل شده اند، این در عملکرد عادی چه چیزی را نشان می دهد؟ هیچی، بدون تغییر :) از آنجایی که مقاومت غیر صفر بین لغزنده مقاومت و نقطه 1 وجود دارد، تمام جریان مستقیماً به نوار لغزنده میرود، مانند عدم تماس بین نقاط 1 و 2. اما اگر تماس بین لغزنده و لایه مقاومتی از بین می رود؟ و این وضعیت کاملاً مشابه عدم اتصال مستقیم نوار لغزنده به نقطه 2 است. سپس جریان از طریق رئوستات (از نقطه 1 تا نقطه 3) عبور می کند و مقدار آن برابر با:
یعنی اگر در این مدار تماس قطع شود، فقط قدرت جریان کاهش می یابد و مانند حالت قبل قطعی کامل در مدار ایجاد نمی شود.
با رئوستاتما متوجه شدیم، بیایید به مقاومت متغیر متصل شده مطابق مدار پتانسیومتر نگاه کنیم.

مقاله ابزار اندازه گیری در مدارهای الکتریکی را از دست ندهید -
برخلاف رئوستات، برای تنظیم ولتاژ استفاده می شود. به همین دلیل است که در نمودار ما دو ولت متر می بینید :) جریان عبوری از پتانسیومتر، از نقطه 3 تا نقطه 1، در هنگام حرکت دادن نوار لغزنده بدون تغییر باقی می ماند، اما مقدار مقاومت بین نقاط 2-3 و 2-1 تغییر می کند. . و از آنجایی که ولتاژ با جریان و مقاومت نسبت مستقیم دارد، تغییر خواهد کرد. هنگام حرکت دادن لغزنده به سمت پایین مقاومت 2-1 کاهش می یابد و بر این اساس قرائت های ولت متر 2 نیز کاهش می یابد و با این حرکت لغزنده (پایین) مقاومت قسمت 2-3 افزایش می یابد و به همراه آن ولتاژ روی ولت متر 1. در این حالت، مجموع قرائت های ولت متر برابر با ولتاژ منبع تغذیه خواهد بود، یعنی 12 ولت. در بالاترین موقعیت روی ولت متر 1 0 ولت خواهد بود و در ولت متر 2 - 12 ولت. در شکل، لغزنده در موقعیت وسط قرار دارد و قرائت ولت مترها که کاملاً منطقی است برابر است :)
اینجاست که نگاه کردن را به پایان می بریم مقاومت های متغیر، در مقاله بعدی صحبت خواهیم کرددر مورد اتصالات احتمالی بین مقاومت ها، از توجه شما متشکرم، خوشحال خواهم شد که شما را در وب سایت ما ببینم! 🙂



